
After some humble beginnings to the semester (Newton’s Laws, basic structural mechanics, and gear ratios), we have had a string of exciting projects in our middle school engineering elective. Within the last few weeks, students have built railway bridges, designed high-torque crane systems, and are now writing code for simple three-wheeled robots.
 |
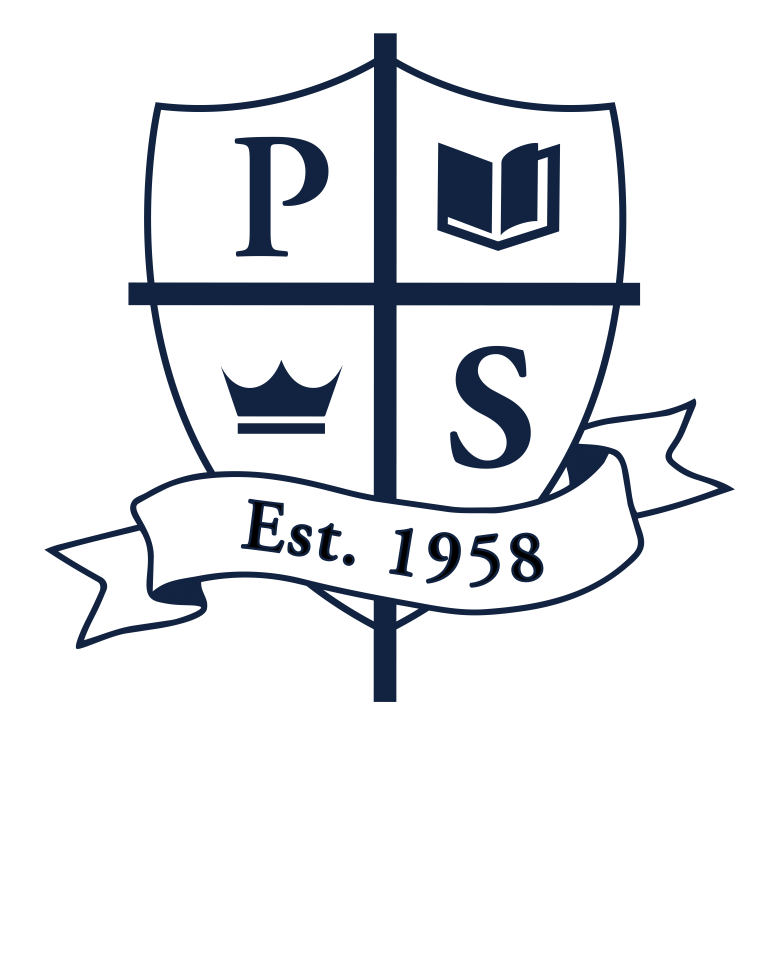
| Mr Meadth stands watch over the first train journey of the day–all is well! |
 |
| Another bridge with an underslung truss system |
 |
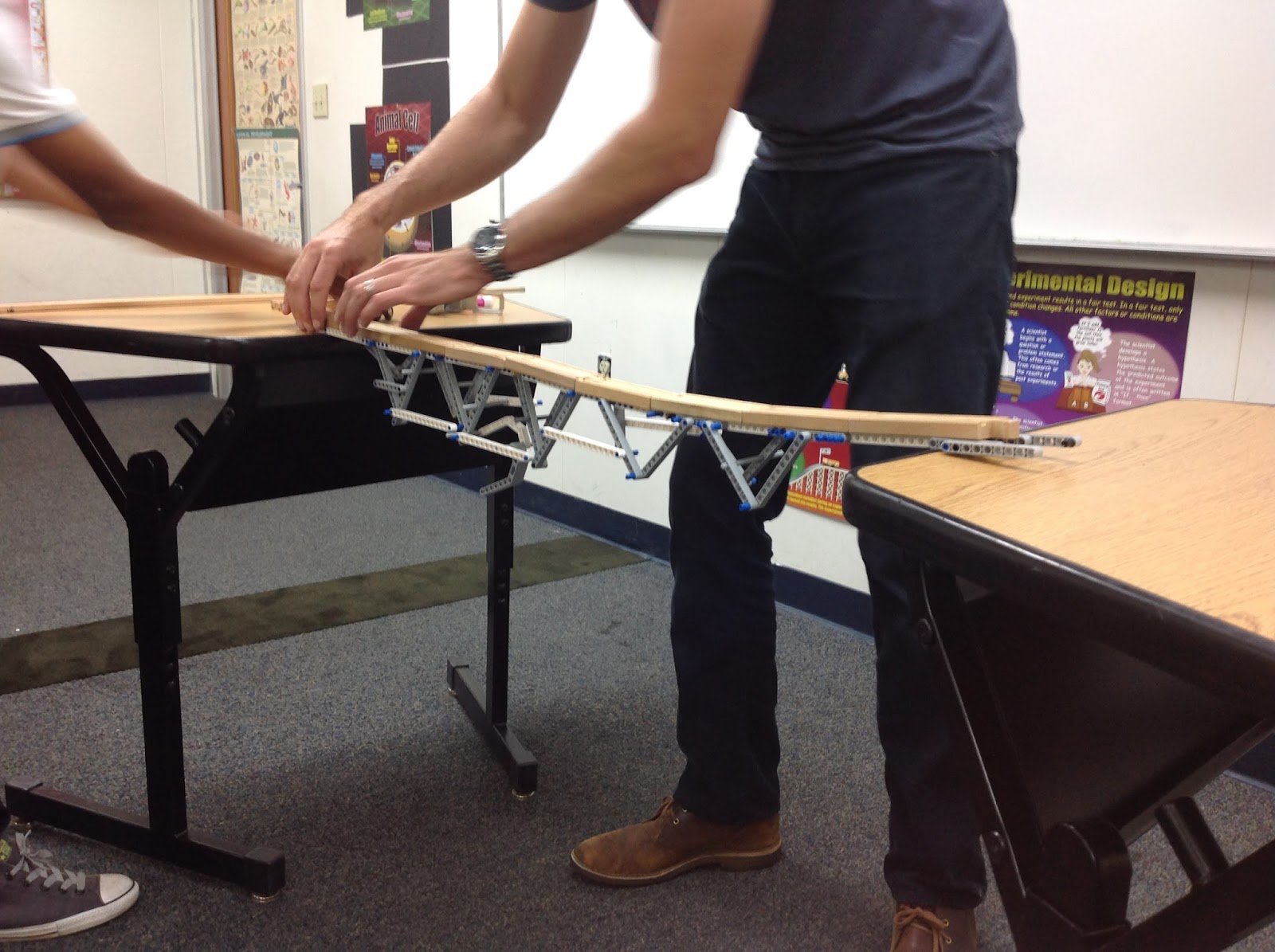
| Asher and Christine carefully plan out their triangular structures |
 |
| Zach and Isaiah feel the increase/decrease in torque for a 3:1 ratio |
 |
|
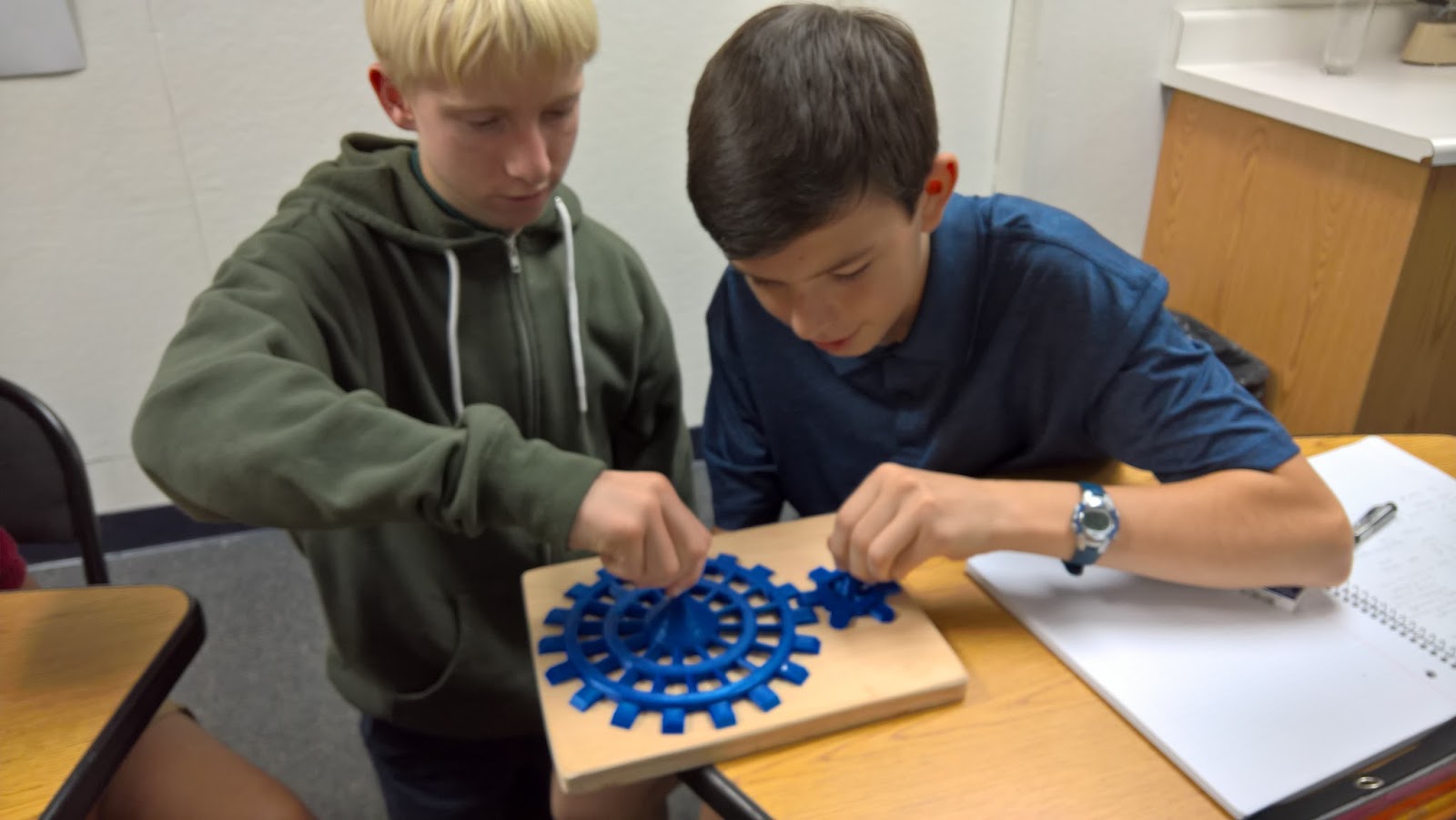
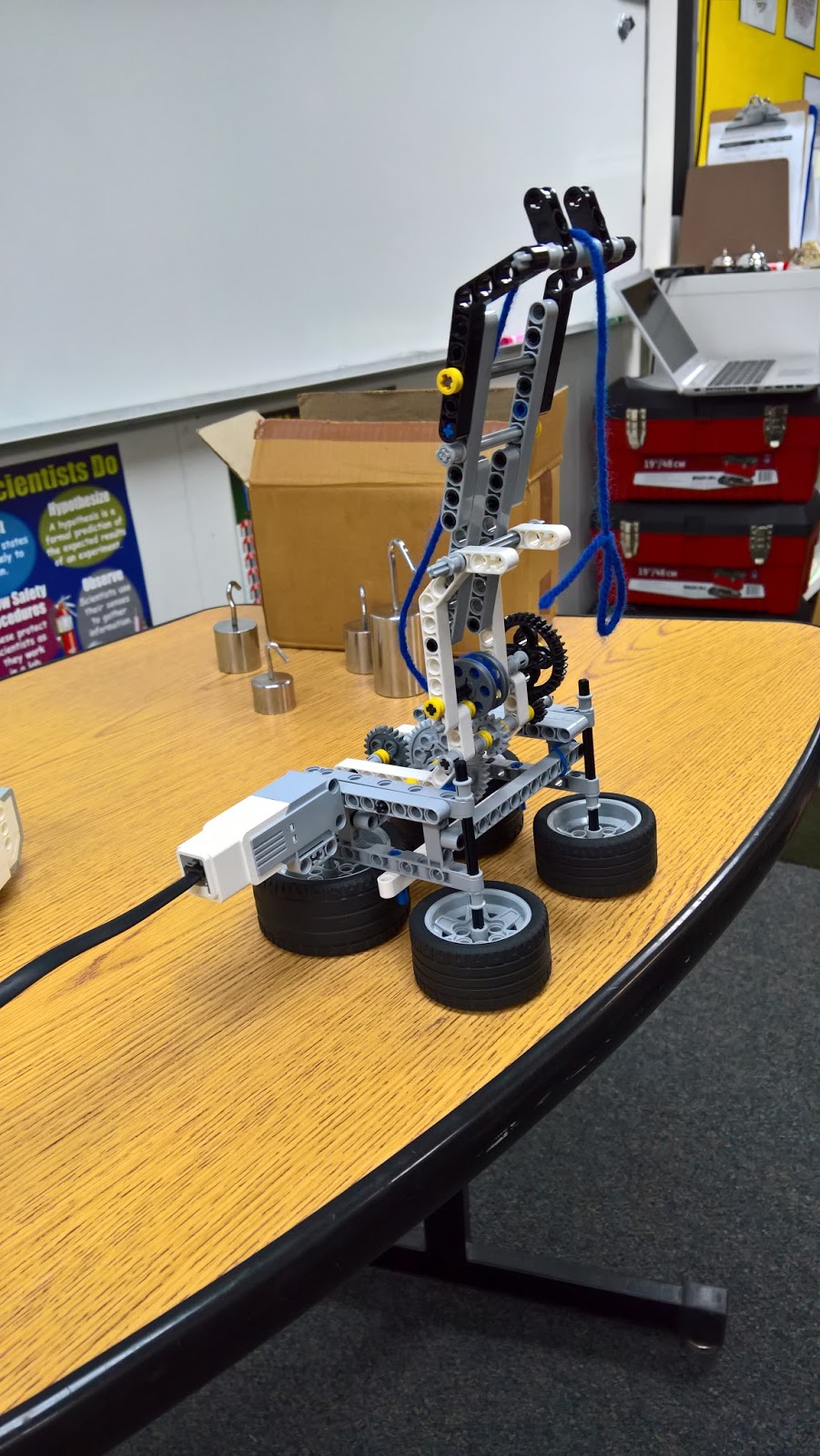
Zach and Sam added a few “characters” to their
impressive submission, and were able to
raise 800 grams (almost 2 lb)
|

 |
|
Lily and Isabela and “The Giraffe”; they raised
a total of 300 grams
|
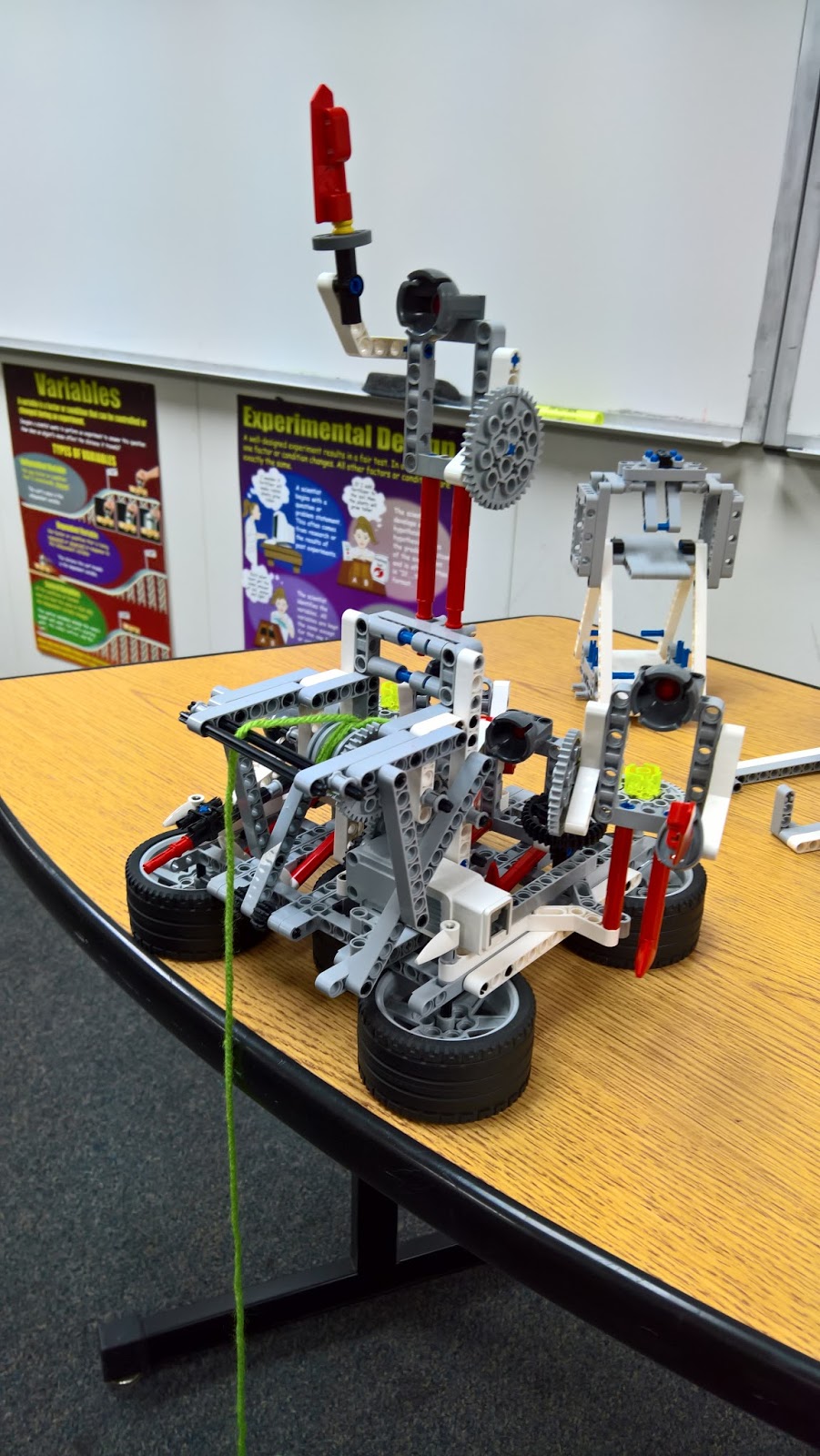
Currently, students are working with a basic robot called the “Robot Educator”. This three-wheeled design is built from instructions, and is for the purpose of learning basic programming skills. The students are learning to tell the robot to move forward/backward, turn around, raise and lower its front trap, and make noises. They are also finding out about loops and conditions and switches, which help make programs more sophisticated. All of this experience will be used later in the semester as the teams design, build, and program their own robot.
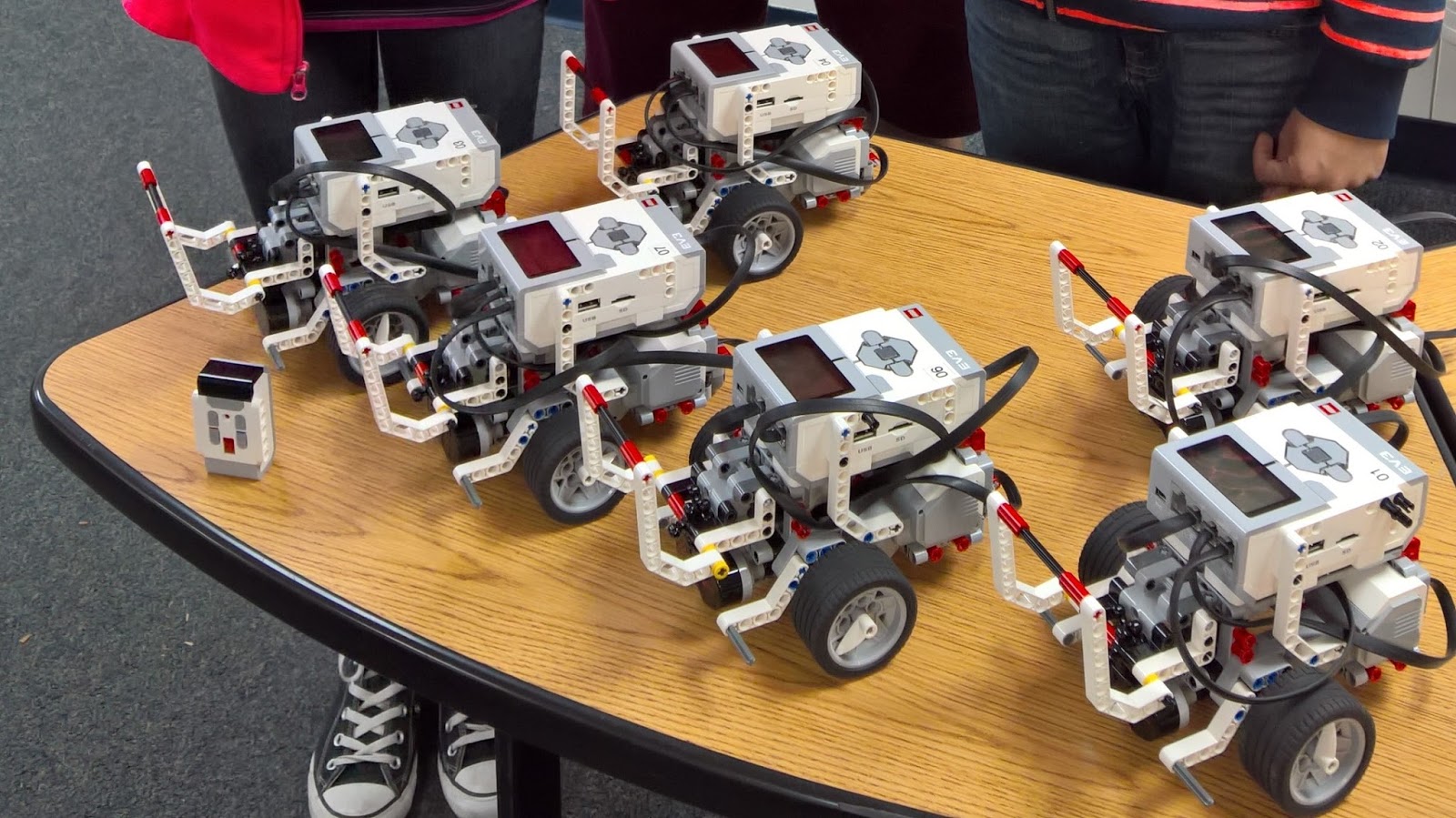 |
| Seven Robot Educators, lined up and ready for action! |
More to come, so stay tuned!